PicoChess is a software developed by Jean-Francois Romang that brings several chess engines to a DGT board and allow full control via the second queen (i.e. no cpmputer required!. It works with a Raspberry Pi and a DGT-3000 chess clock.
DGT offers an all-in-one solution (DGT-3000 with a Raspi) for £280. The DGT-3000 alone sells £50, so quite an up-mark for a £28 Pi!
Based on the work others have done, I developed a board that allows you to connect a Raspberry Pi to the DGT-3000 without too much hassle. You need a soldering iron for the power cable (from the Pi to the DGT-3000).

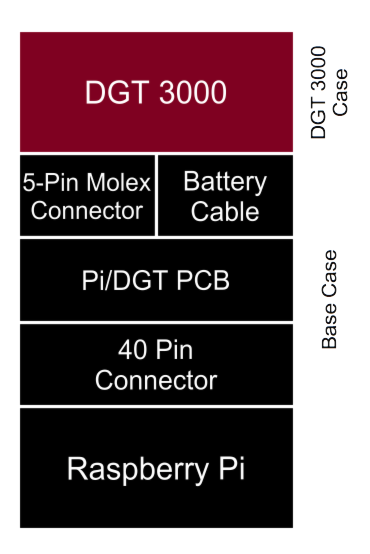
The solution consists of the following components:
- A DGT-3000
- Raspberry Pi (a Raspi 3 will work best with the PicoChess engines, though a Zero W cor an older Pi can be used as well)
- The connector cable (Pi-Hat with molex and power connector for the clock)
- a 5-pin Molex connector cable
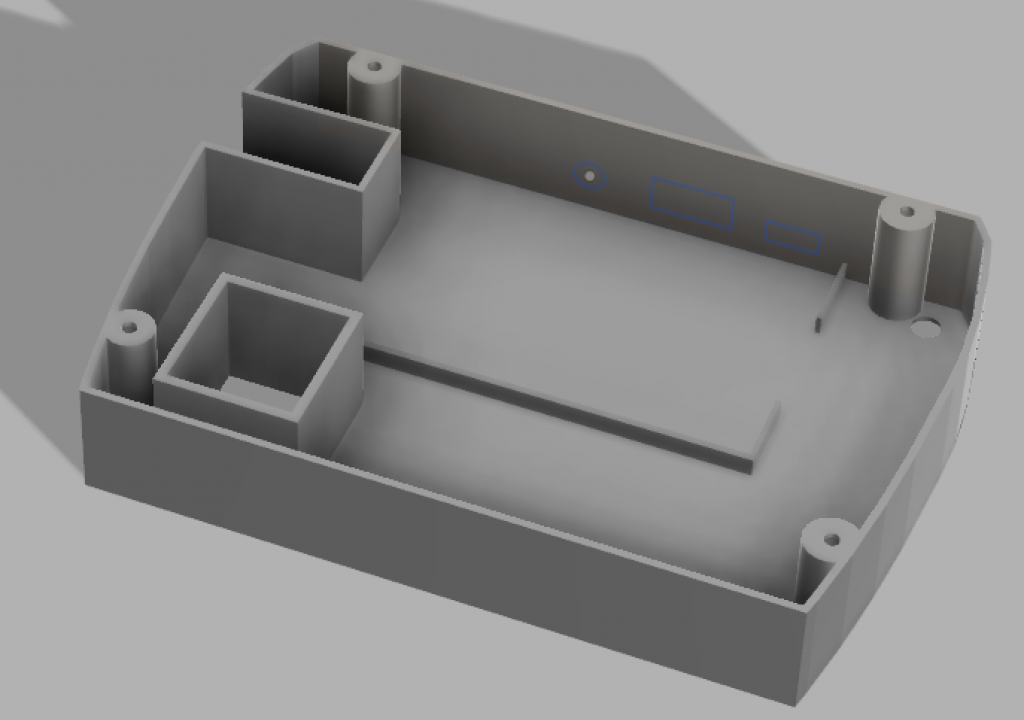
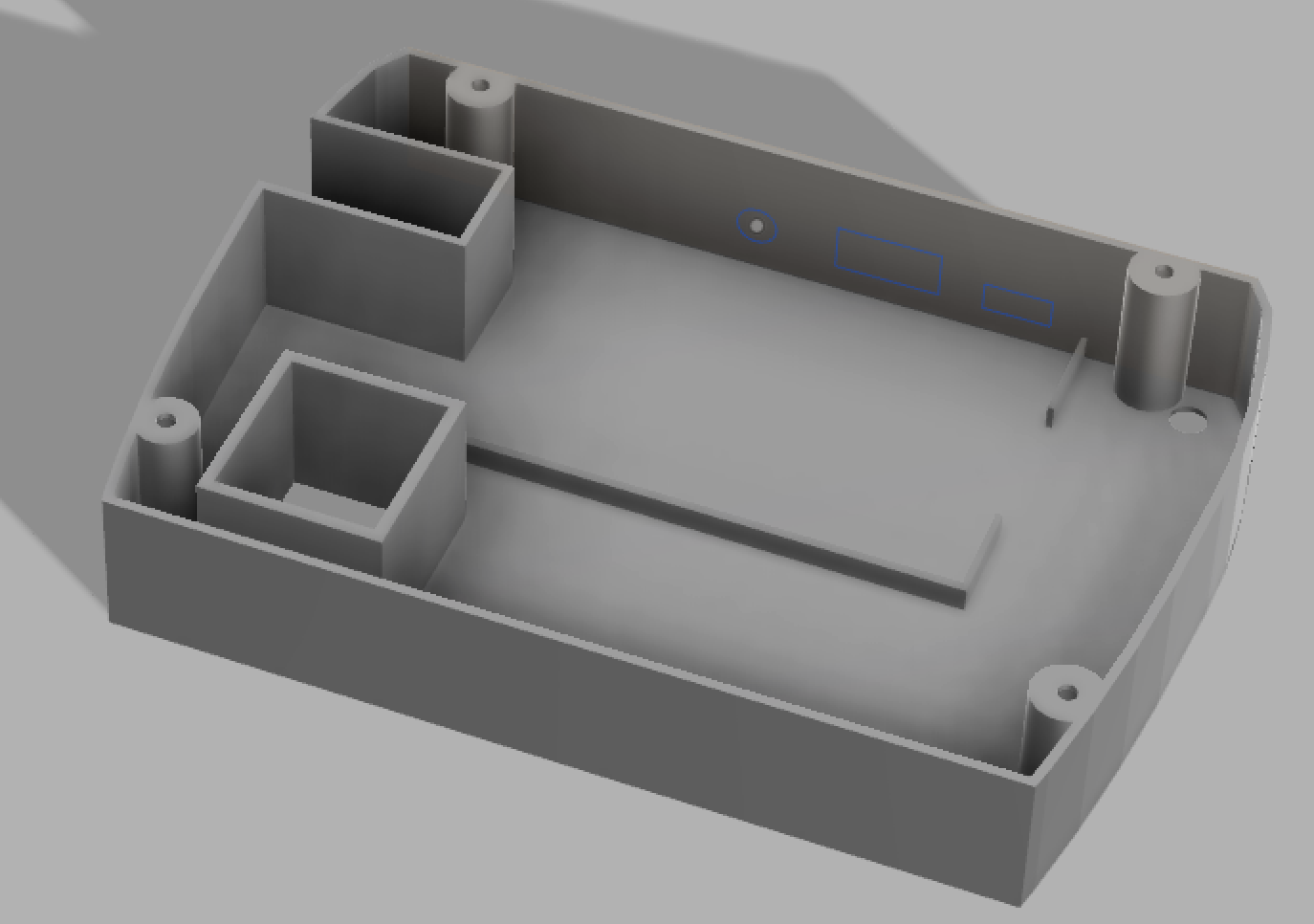
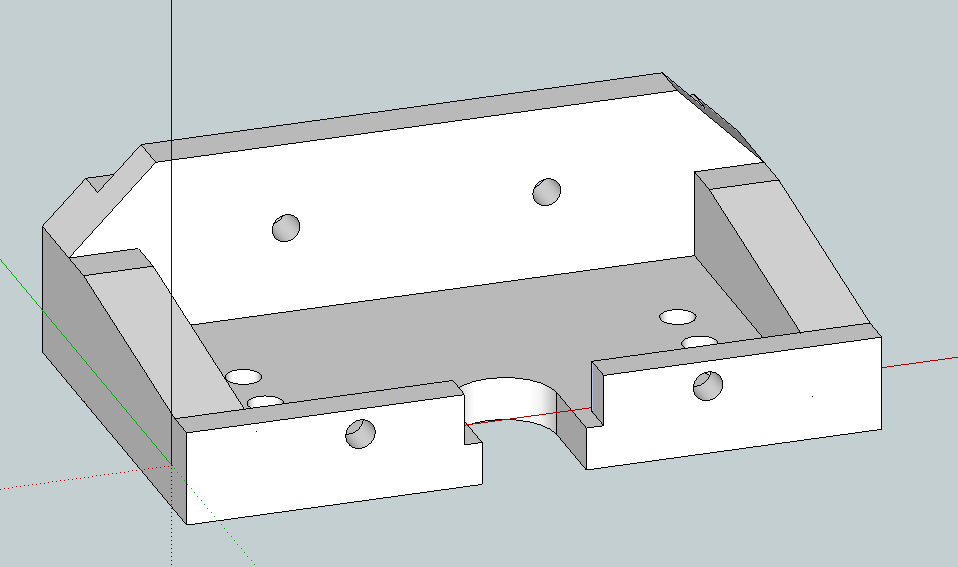
- A Case that serves as a base for the clock and houses the Pi and the connector board
You remove the small board that holds the 3.5mm connector and instead the board will be connected directly to the RasPi via USB (I added a magnetic USB-C connector to easily hook up the board and the RasPi.
Just to clarify: After this conversion, you will no longer have the 3.5mm connector (and a little hole on the side of your DGt-3000).
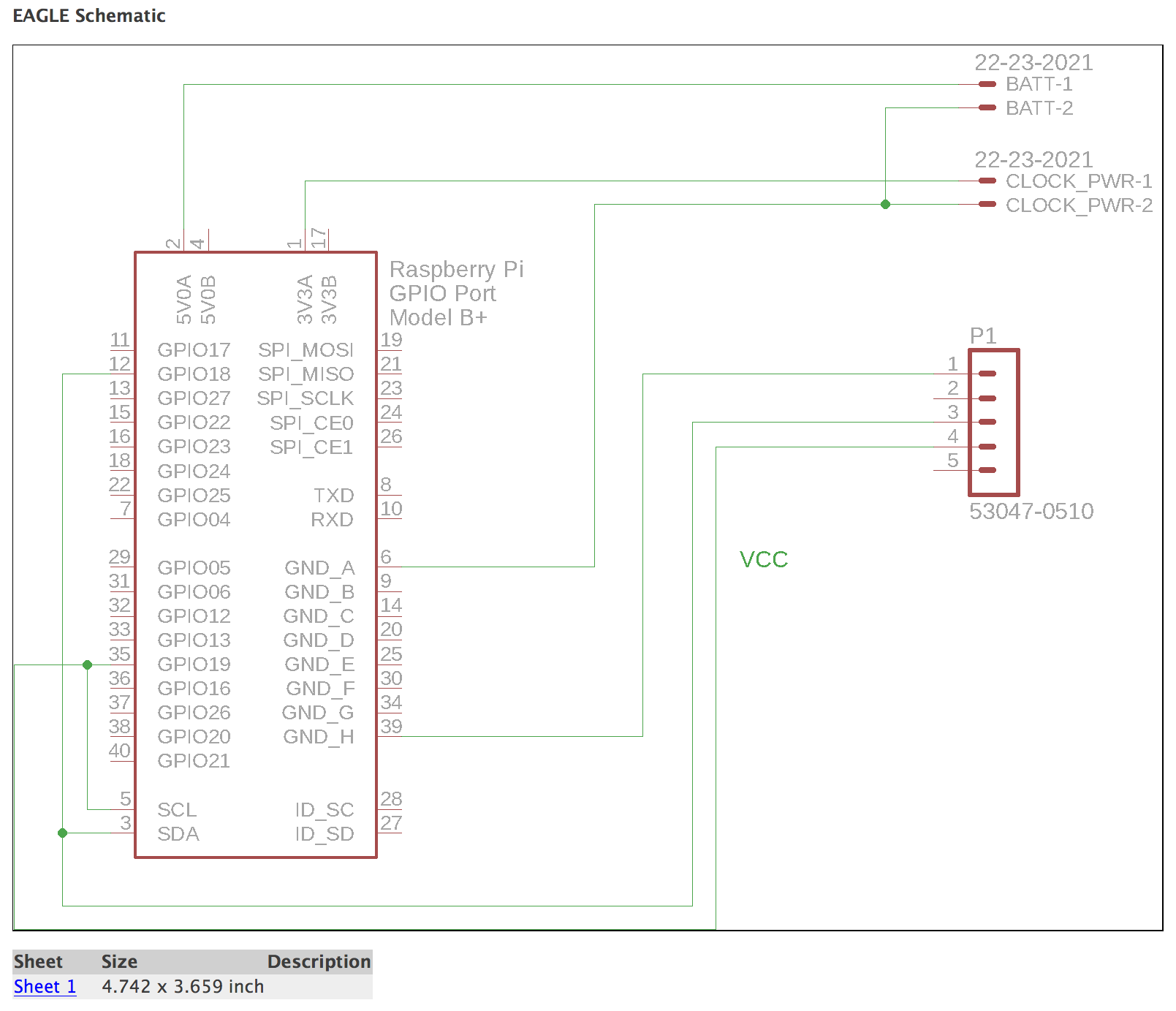
Layout of the molex connector:
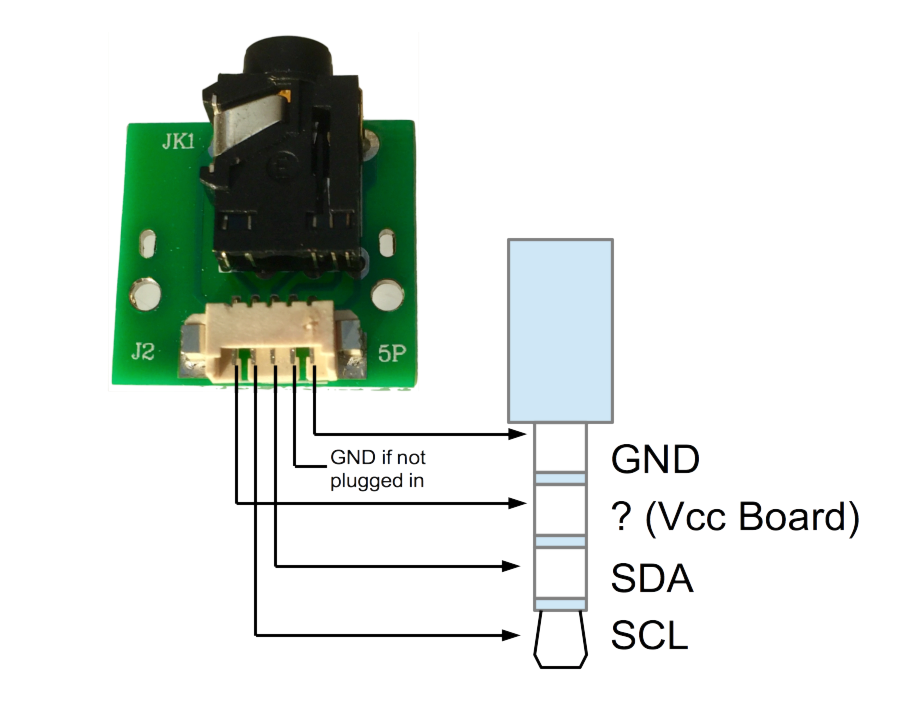
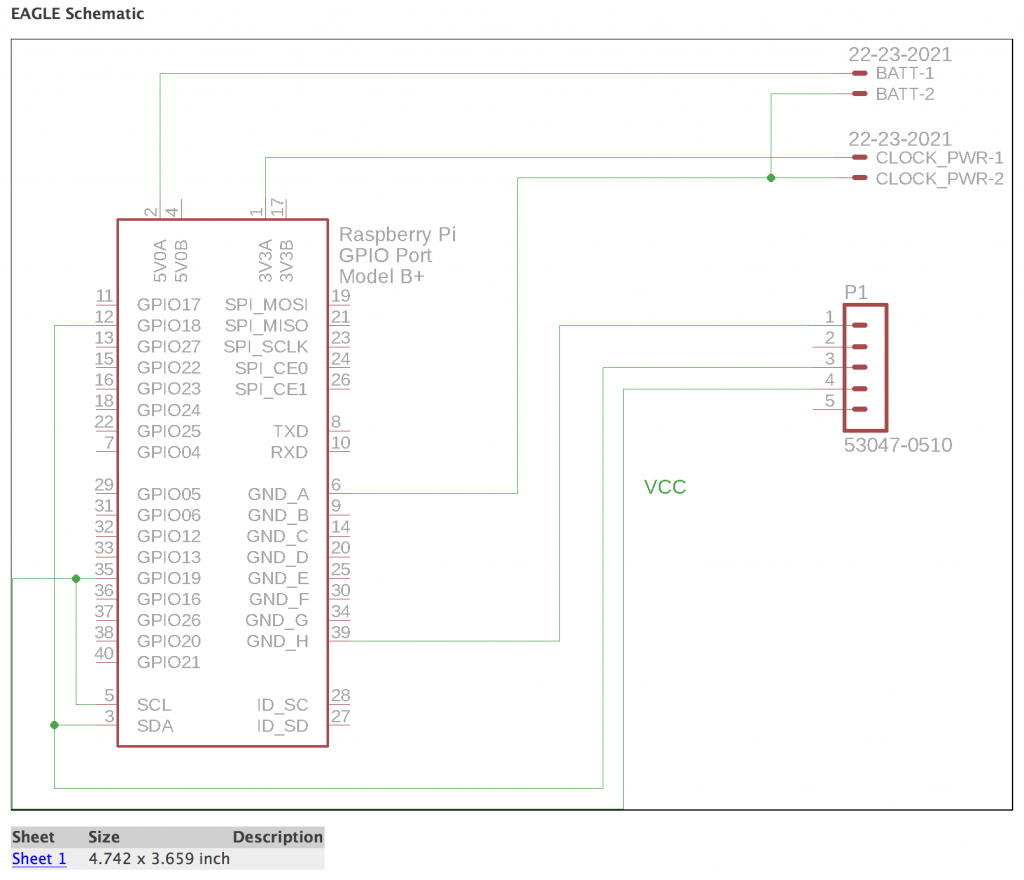
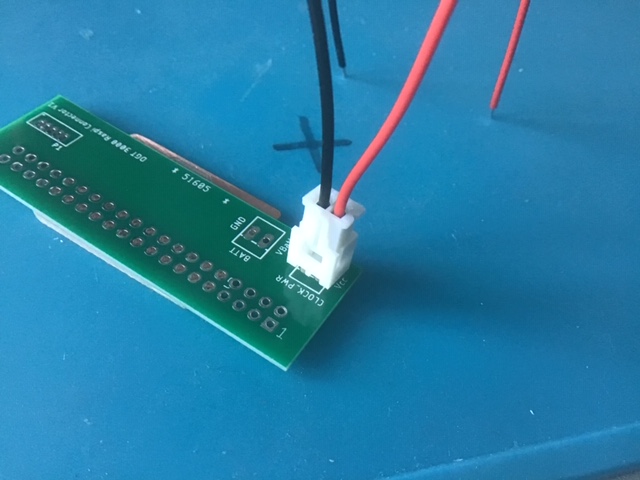
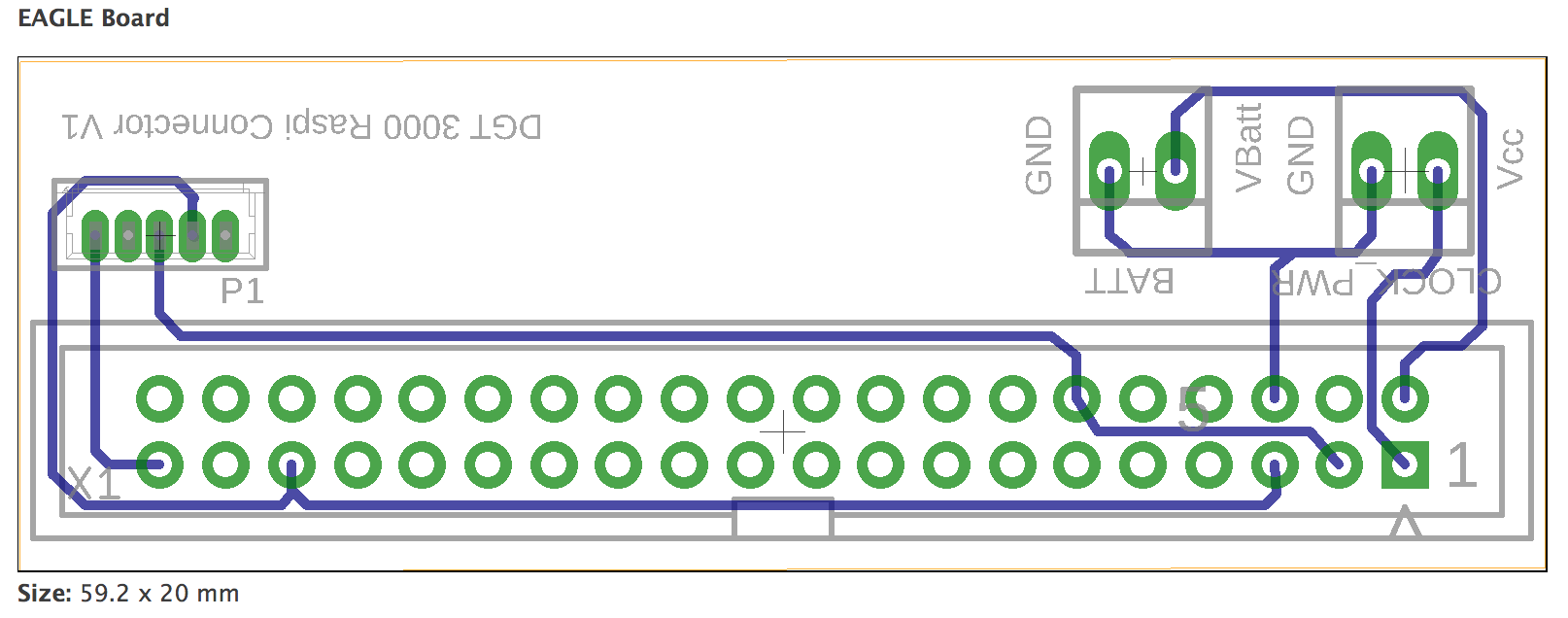
This is the layout of the board that connects the RasPi with the mainboard of the DGT-3000. The “Batt.” connector is optional. At some point I envisioned adding batteries to the case, but instead I just use a power bank to power the RasPi, which in turn powers the DGT-3000 clock and the DGT board (via USB).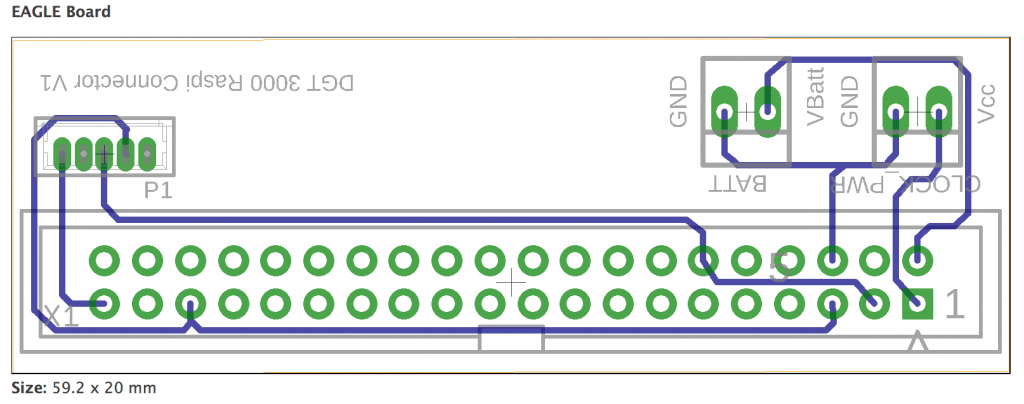
 Gerber Eagle Files
Gerber Eagle Files
In principle, you can mount the molex and battery connectors on either side of the board (rotate the connectors around the long side of the board, so they still connect to the same pads).
[5.Oct2019 correction:] The power cable that ships with the connector set that I offer on eBay requires you to mount the connector the other way around (nudge facing the 40-pin connector, second picture below). As a rule, always ensure that the red cable (+) is the one closest to the corner of the board.
A big thank you to Simon for making me aware.

Correct positioning of the connector/cable:
If someone manages to fit a rechargeable battery inside the case, please give me a shout:



Resources:
| Description (RS-Components) |
Brand |
Distributor |
Part No. |
Price [£] |
| Molex PicoBlade 15134 Series Number Wire to Board Cable Assembly 1 Row, 5 Way 1 Row 5 Way, 300mm |
Molex |
RS Components |
15134-0503 |
3.74 |
| Molex PICOBLADE 53047, 1.25mm Pitch, 5 Way, 1 Row, Straight PCB Header, Through Hole |
Molex |
RS Components |
53047-0510 |
0.4 |
| 250mm, 20 AWG, red, black |
|
|
|
|
| M2.2x20mm 304 Stainless Steel Phillips Countersunk Head Self Tapping Screw |
|
|
|
|
I had a batch of the PCBs produced and am happy to sell them.
Search on eBay UK for DGT3000 PCB or the DGT3000 PicoChess Conversion Kit (Includes board, bottom case and cables. Not always available, contact me if you cannot find it).
Please note 75% of the proceeds go directly to Save the Cildren
Files: Eagle Files, DGT-3000 Case, Gerber, picochess.ini









{kind=link}